
2.1 点云阶段的四大金刚,用错一个毁所有
点云处理看起来命令很多,其实真正核心的就那么四五个。把这几个玩明白,能解决百分之九十的问题。
体外孤点 —— 别上来就无脑点
体外孤点就是那些飘在主体外面的噪点。激光扫描时,环境光干扰、工件表面的灰尘、甚至操作员衣服上的反光点,都可能被误认为有效数据。
软件怎么判断哪个点是孤点?用的是统计滤波,具体来说是基于k-d tree的邻近点搜索。算法会计算每个点到它附近k个邻居的平均距离,然后看这个距离在整个点云中的分布。如果某个点的平均距离远大于整体均值,比如超过三倍标准差,就被判定为孤点。
关键参数就两个:邻近点数量和标准差倍数。
邻近点数量,我一般设50个。这个数字太小了,比如设10个,算法只看附近一小撮点,会把一些边界上的有效点误删。设太大了,比如200个,计算量会成倍增加,而且对局部密集的噪点不敏感。
标准差倍数,这是个阈值。设3.0是比较安全的,能去掉明显的离群点,又不会伤到边缘特征。如果扫描环境特别干净,可以降到2.5,过滤得更干净一些。反过来,如果工件表面本身就是粗糙的铸造面,噪点比较多但都贴在表面上,倍数要调到4.0以上,否则会把表面细节一起删掉。
有个坑我必须说:不要在刚导入点云的时候就做体外孤点过滤。先大致看一眼,如果有明显的飞点,手动框选删除比自动过滤更可靠。自动过滤对那种成片出现的噪点基本无效,因为它们互相之间的距离很近,算法不认为它们是孤点。
减少噪音 —— 光顺和细节的生死博弈
这是最容易被滥用的命令,没有之一。
减少噪音的本质是滤波算法。Geomagic里用的是双边滤波或者高斯滤波,具体哪个版本有差异。双边滤波好一些,因为它会在平滑的同时保留边缘。高斯滤波就是无差别平均,会把棱角抹圆。
参数面板上通常有两个滑块:平滑度和细节保留。
平滑度控制滤波的强度,从1到10。细节保留控制算法在多大程度上保护特征边界,也是1到10。
我见过太多人拿到数据后直接平滑度拉满到10,点云是光溜了,原本0.1毫米的棱边变成了0.3毫米的圆角。后面做偏差分析的时候,发现和原始样件差了0.15毫米,还以为是扫描精度不够,其实是自己把数据磨坏了。
正确的做法是:平滑度设在5到6之间,细节保留至少8。然后点应用,看看效果。如果噪点还是很明显,重复做两次,每次用较弱的参数,效果远好于一次强平滑。
还有一个技巧:对于需要保留锋利棱边的区域,先用套索工具圈出来,反向选择,把不需要高精度的曲面区域单独平滑。棱边区域保持原样。
什么情况下可以用强平滑?扫描的工件本身就是自由曲面,没有明显的棱边和特征,比如汽车后视镜外壳、玩具公仔的身体。这种曲面追求的是光顺,细节本身就不存在,强平滑反而能消除扫描带来的微小波纹。
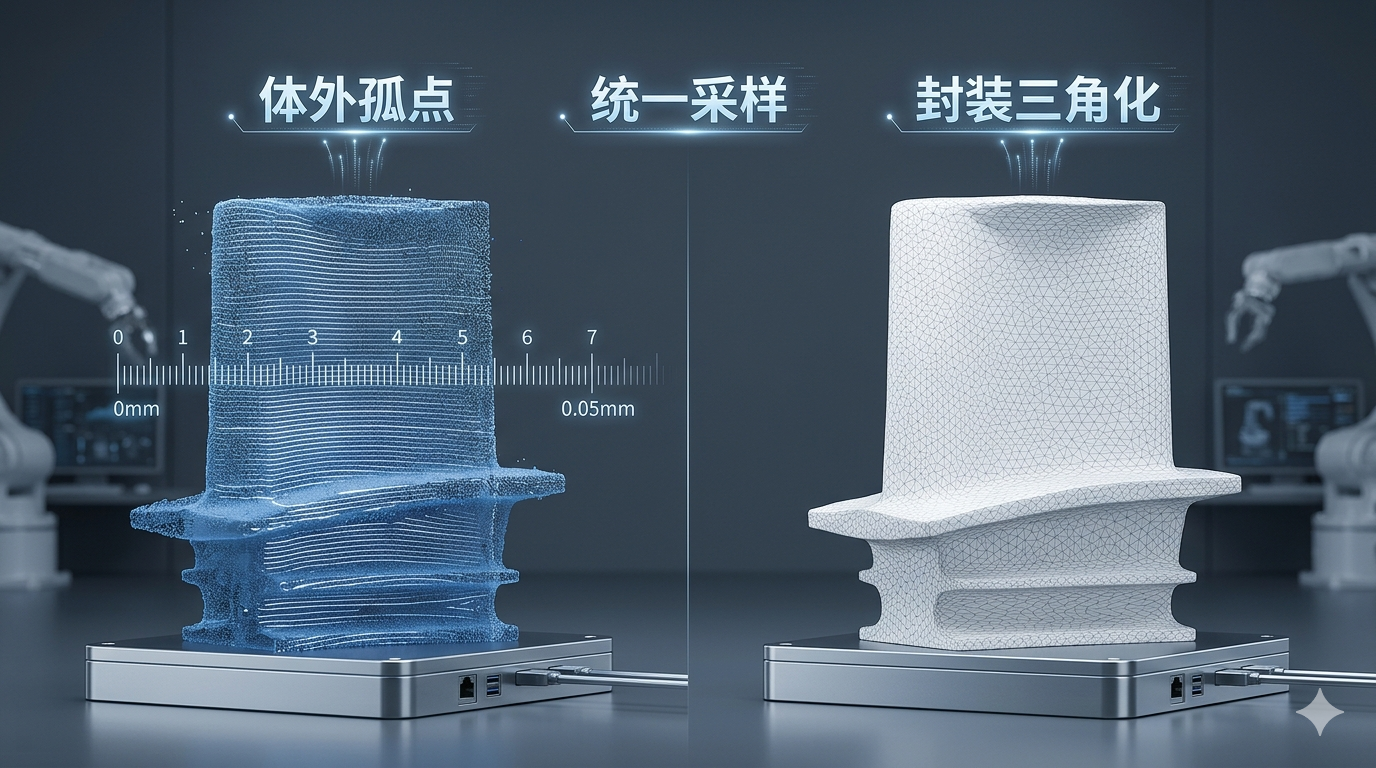
统一采样 —— 别让点云胖死你的电脑
扫描仪出来的点云,点密度通常是不均匀的。正对着扫描头的区域点密,侧面和边缘点疏。几百万个点不算什么,但封装成三角网格后,面片数量会暴增,普通电脑根本带不动。
统一采样的作用就是降点,让点云变得均匀。算法用的是体素网格降采样:把整个点云空间划分成一个个小立方体,每个小立方体里只保留一个点,通常保留重心位置的那个。
体素尺寸是唯一的关键参数。怎么设?经验值是扫描精度的三到五倍。比如扫描精度0.02毫米,体素尺寸设0.06到0.1毫米。设太小了起不到降点的作用,设太大了会丢失小特征。
举个反例:有一次我拿到一个同事处理过的点云,一个拳头大的工件,点云只有两万个点。封装出来的网格棱角全没了,像被水泡过一样。一查参数,他设的体素尺寸是0.5毫米。小特征比如0.3毫米的台阶,根本保不住。
还有一个细节:统一采样应该在减少噪音之后做。先平滑再去重,顺序反了的话,噪点会被均匀采样保留下来,后面更难处理。
封装 —— 从点到面的惊险一跃
封装就是把点云变成三角网格。算法叫贪婪投影三角化,听着高大上,原理不复杂:先把三维点云投影到一个二维平面,在这个平面上做Delaunay三角剖分,然后再映射回三维空间。
关键参数是最大三角形边长。
这个参数设小了,点云如果有空洞,算法会跳过,留下空洞。设大了,算法会强行跨过空洞生成三角形,把孔洞桥接起来,桥接出来的面是平的,会破坏曲面原有的曲率。
正确做法是先看点云的空洞有多大。测量一下空洞最宽处的距离,把这个距离乘以1.2到1.5,作为最大边长。这样既能把空洞留下来后面单独补,又不会在非空洞区域产生跨接。
封装后的网格,第一步要做什么?检查法向。在Geomagic里用显示法线的功能,看看所有三角形的朝向是不是一致的。如果有的朝外有的朝内,用统一法向的命令修复。法向不一致会导致后面的布尔运算和曲面拟合全部出错。
2.2 网格修复三板斧,遇到烂面别慌
封装出来的网格,十个里有八个需要修。不是扫描的问题,是三角剖分算法的固有问题。
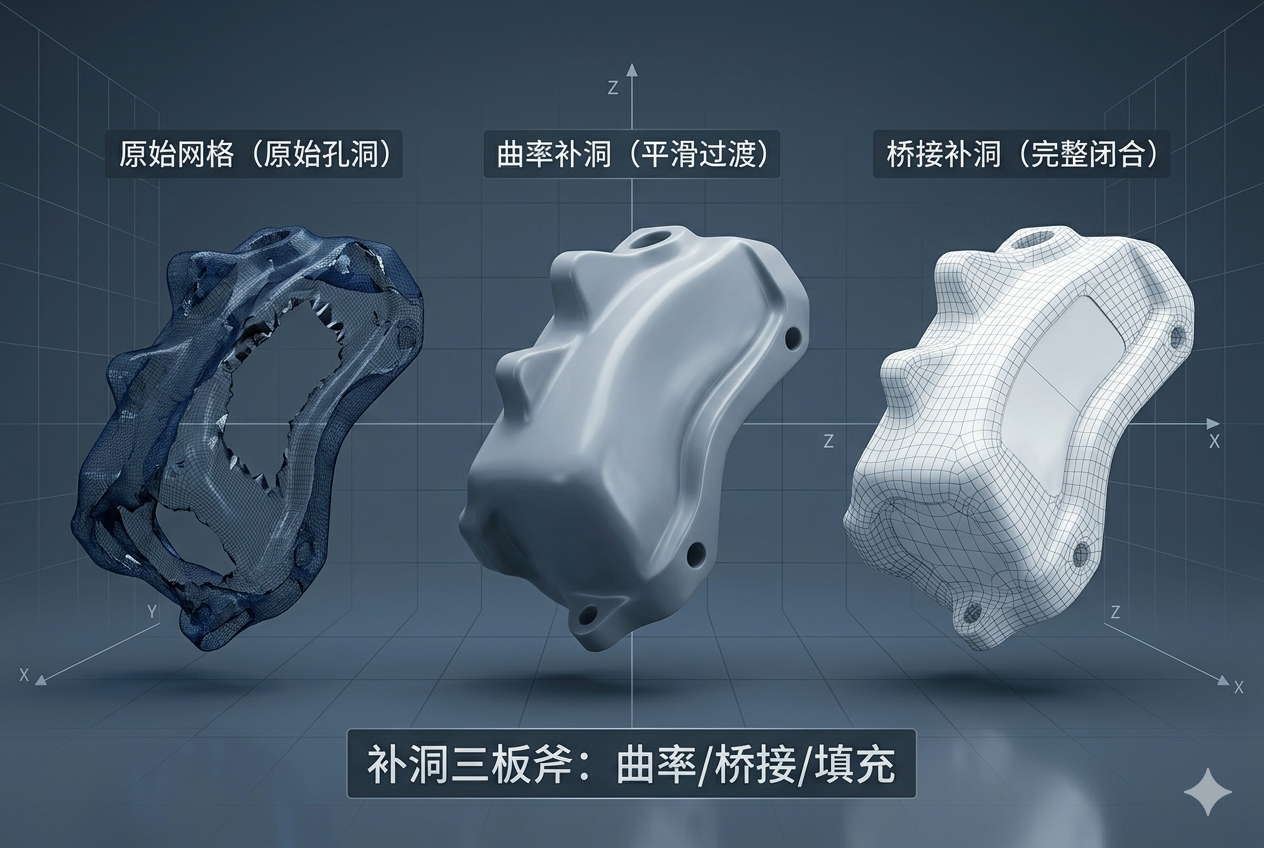
补洞 —— 不是所有洞都值得补
先判断这个洞该不该补。位于产品边界上的洞,比如一个开口盒子的边缘,这不是洞,这是特征,不要补。位于曲面中间、而且周围曲率连续的区域,这个需要补。
Geomagic提供三种补洞方式,各有用处。
曲率补洞是最常用的。算法会根据洞边界周围的曲率信息,推断出洞内应有的曲面形状。这种补出来的面与原曲面连续性好,但边界会往里收缩一点,大概0.02到0.05毫米。对于非配合面,这点收缩可以接受。
桥接补洞适合那种窄长的裂缝。比如两个网格面片之间有缝隙,不是真正的空洞。用桥接补洞,手动选择裂缝两侧的边界点,软件会生成一系列三角形把两边缝合起来。这需要手动操作,但效果好。
填充只适用于平面区域。如果一个洞周围的网格在一个平面上,用填充命令,软件会生成一个严格的平面把洞盖住。不要用在曲面上,否则会得到一个平面补丁,和周围曲面形成台阶。
补洞的次序也有讲究。先补大的、曲率变化复杂的洞,因为这些洞手动调整的空间大。最后补小的、简单的洞,一键曲率补洞就行。
松弛 —— 光顺和保形怎么兼得
松弛就是网格光顺。点云阶段的减少噪音是针对点的,松弛是针对三角形的。
二阶拉普拉斯松弛是最常用的算法。它把每个顶点向邻居顶点的平均位置移动,重复多次后网格会变得平滑。缺点是会让网格收缩,体积变小。
曲率保持松弛是改进版。算法在移动顶点之前,先计算该点的曲率,如果曲率大(说明是棱边),就减少移动量或者不移动。这样可以在光顺曲面的同时保留棱边。
迭代步数控制在15到20步就够了。步数太多,网格会变得过于柔软,失去刚性。判断标准是看曲率图,颜色变化应该平滑过渡,不该出现斑点状的噪点。
一个实战经验:对于铸造件表面那种橘皮状的粗糙纹理,不要试图用松弛完全抹平。那是铸造工艺本身的特征,抹平了反而不像原件。松弛的目的是去掉扫描引入的高频噪点,不是改变工件本身的表面形貌。
移除特征 —— 有些东西不该出现在模型里
抄数经常遇到一个需求:客户不想要产品表面的文字、商标、花纹,只要光面。
直接删除这些特征所在的三角形,然后补洞,是最笨的方法。补出来的面是平的,如果原来的表面是弧面,平的面会非常突兀。
正确的做法是使用移除特征命令,而不是简单的补洞。这个命令的原理是:选中要移除的区域后,软件会根据周围未被选中的曲面,拟合出一个平滑的曲面来替换选中区域。拟合算法可以选平面、圆柱面、球面或者自由曲面。
对于商标文字这种凹凸特征,选自由曲面拟合,软件会自动填充凹坑或削平凸起,生成一个与周围曲率连续的过渡面。
有个坑:如果文字区域正好在曲面曲率变化剧烈的位置,比如靠近棱边,自动拟合可能会失败。这时候需要手动在周围画几条约束线,强制拟合曲面通过这些线,然后再移除特征。
2.3 特征提取,从网格回到几何
逆向建模的关键一步,是从离散的三角网格中提取出规则的几何特征。平面、圆柱、球面这些,都是数学定义的规则形状,不能直接用网格来代表。
平面拟合 —— 最小二乘法的实战
选择网格上的一个区域,软件会用最小二乘法拟合出一个平面。算法会让所有选中点到这个平面的距离的平方和最小。
输出结果包含三个信息:法向量、平面位置、平面度误差。
平面度误差是最重要的。它是所有选中点到拟合平面的最大距离减去最小距离。如果这个误差小于0.02毫米,说明这个区域确实是一个平面。如果误差超过0.1毫米,说明这个区域不是平面,可能是弧面或者变形了。
有个技巧:提取平面时不要选太大区域。如果一个面理论上应该是平的,但实际注塑出来有0.05毫米的翘曲,选了整个面拟合出来的平面会是翘曲面的平均位置,不是理论平面。正确做法是在平面上选三个小区域,分别拟合,然后用这三个点确定一个理论平面。
圆柱拟合 —— 注意轴线方向
圆柱拟合比平面复杂得多。算法要同时优化轴线方向和直径两个参数。
输出结果:轴线方向向量、轴线上一点坐标、直径、圆度误差。
圆度误差是垂直于轴线的截面上,点到拟合圆的距离偏差。这个值如果超过0.03毫米,说明圆柱不圆,可能是变形或者扫描精度不够。
实际应用中,圆柱常用于提取螺丝柱、定位销孔。拟合出来的轴线可以作为后续建模的基准。
球体拟合 —— 四点定球
球体拟合最简单,四个不共面的点就能唯一确定一个球。算法会用最小二乘法优化球心和直径。
用于提取球面铰链、滚珠等特征。输出球心坐标和直径。
基准对齐 —— 3-2-1法是铁律
提取完特征,下一步是把扫描数据对齐到坐标系。这一步做错了,后面建的模型全是歪的。
两种对齐方法:最佳拟合和特征对齐。
最佳拟合是最小二乘法,让整个网格到目标位置的偏差平方和最小。这个方法的缺点是会平均化所有偏差。如果一个产品整体没问题,但局部有变形,最佳拟合会把变形分散到整个模型上,让你看不出哪里真的变形了。
特征对齐是正确的方法。最常用的是3-2-1法:先选三个不共线的点确定一个平面(比如底面),再选两个点确定一条线(比如一条边),最后选一个点确定原点。这样对齐出来的坐标系,每个特征都有明确的几何意义,偏差分析的结果才有参考价值。
在Geomagic Design X里做3-2-1对齐时,选的点最好是从提取的平面、圆柱、球体特征上取的,而不是直接在网格上点。特征提取能过滤掉网格的局部噪点,更准确。
2.4 三个让新手崩溃的坑
说几个我见过的惨案,希望各位别重蹈覆辙。
第一个坑:点云处理顺序搞反。有人先封装再降噪,结果三角形的数量已经暴增到几百万,电脑卡死,降噪命令跑了一个小时还没完。正确顺序永远是:先处理点云,降噪、采样,最后才封装。
第二个坑:过度平滑。一个做汽车内饰的兄弟,扫了一个带皮纹的方向盘,为了去掉扫描噪点,平滑度拉到8。皮纹细节全部磨平,客户拿到模型一看,说你这个是光面方向盘,我们不要。重新扫,重新处理,耽误了两天工期。
第三个坑:补洞不检查曲率。一个小家电外壳,背面有一圈散热孔,扫描时孔太多导致网格全是洞。新手用曲率补洞一键全补了,软件自动生成了连接孔之间的桥接面。最后做出来的模型,散热孔位置是一整块光面,和实物完全不搭。正确做法是先把散热孔区域单独提取出来,删除所有孔内的网格,保留孔之间的连接筋,然后对连接筋做松弛,对孔的位置不做处理。
点云和网格处理,说到底是个手艺活。参数没有标准答案,全看工件本身的状态和最终用途。多练、多试、多看偏差彩图,慢慢就有手感了。
下一章我们聊逆向建模的核心:如何从网格重建出参数化的CAD模型。规则几何怎么快速拟合,自由曲面怎么搭线构面,以及那些让曲面光顺得像镜面的高级技巧。



